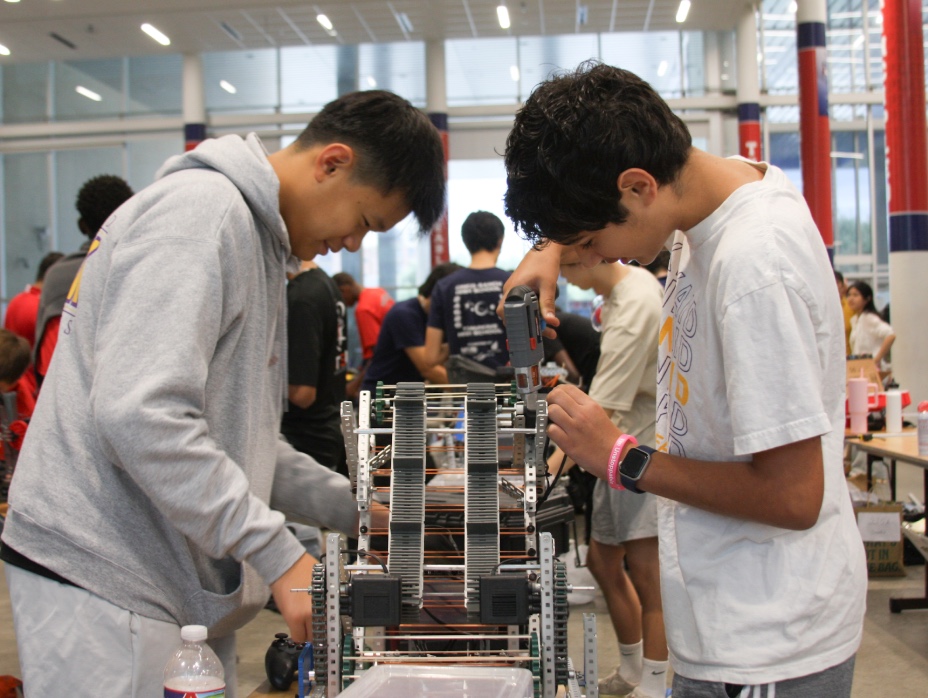
After weeks of building, coding and debugging, Kinkaid’s robotics team kicked off the 2025-26 season at the Push Back Texan Standoff competition.
The competition, held at Lamar High School on Oct. 25, brought teams together from across Texas to test their robots in a series of technical and teamwork challenges. Kinkaid’s team, named the “Falconeers,” successfully scored points and played defense.
The Falconeers proved their robot design to be effective in qualification matches, ranging from third to seventh place and finishing qualifications in sixth place.
The team’s captain was freshman Lucas Jiang, who is the main robot driver and an important builder and coder in the robot’s design.
“Our robot’s main element was our conveyor belt, which allowed us to score and control the high beams,” Jiang said. The high beams in robotics are the highest point on which the robot can score and gain three points for each ball.
“Another important aspect of our robot was our code being able to be autonomous,” Jiang stated. Autonomous is the first 15 seconds of the match, when the robot driver cannot touch the controller. Instead, the robot must be programmed to read the QR codes on the sides of the arena and move itself around to score.
“Early in the season, a lot of teams don’t have autonomous and are too focused on the actual design, which gave us a head start on points,” Jiang said.
The Falconeers made it to the elimination round, where losing one game determines a team’s final space. They won the first elimination round but lost in the quarterfinals.
Although the Falconeers lost the overall competition, they won the award for best-built robot.
“Overall, I think our team did well for its first tournament,” Jiang said. “We gained a lot of learning experience watching matches, and we grew and developed as a team by learning how to cooperate together.”
Now that the robotics team has participated in the first tournament of the year, they have a couple of ideas in mind to enhance their robot to perform even better next time.
“A couple advancements we are going to make now that we have viewed our robot’s errors is to add an attachment to allow the robot to move other colored balls out of the high beam,” freshman Brooke Yu said. “We also might add another conveyor belt to let our robot access the middle and lower beams for optimal scoring potential.”